
Probabilistic Graphical Models
Statistical and Algorithmic Foundations of Deep Learning
Author: Eric Xing
01 An overview of DL components
Historical remarks: early days of neural networks
我们知道生物神经元是这样的: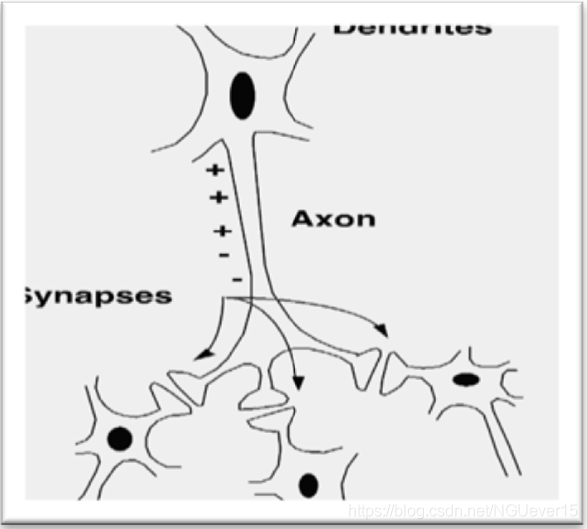 上游细胞通过轴突(Axon)将神经递质传送给下游细胞的树突。 人工智能受到该原理的启发,是按照下图来构造人工神经元(或者是感知器)的。
上游细胞通过轴突(Axon)将神经递质传送给下游细胞的树突。 人工智能受到该原理的启发,是按照下图来构造人工神经元(或者是感知器)的。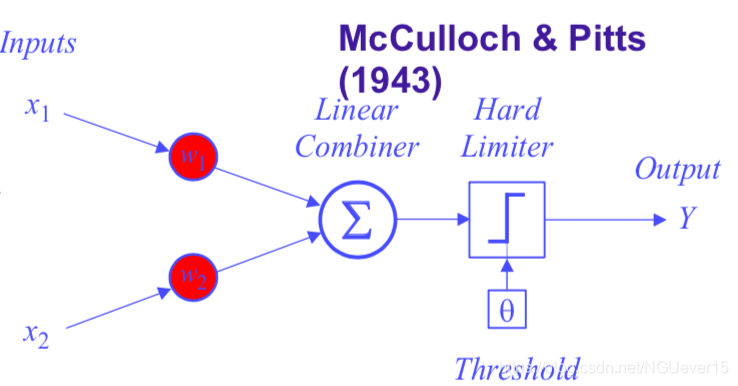 类似的,生物神经网络 —— > 人工神经网络
类似的,生物神经网络 —— > 人工神经网络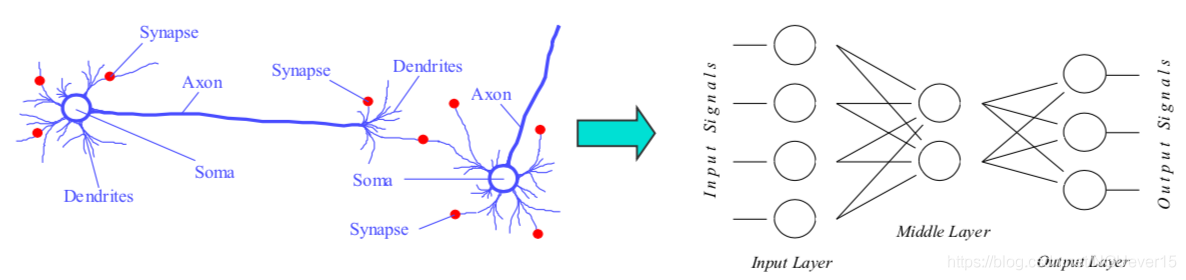 Reverse-mode automatic differentiation (aka backpropagation)
Reverse-mode automatic differentiation (aka backpropagation)
Reverse-mode automatic differentiation (aka backpropagation)
下面我们来看看具体的感知器学习算法。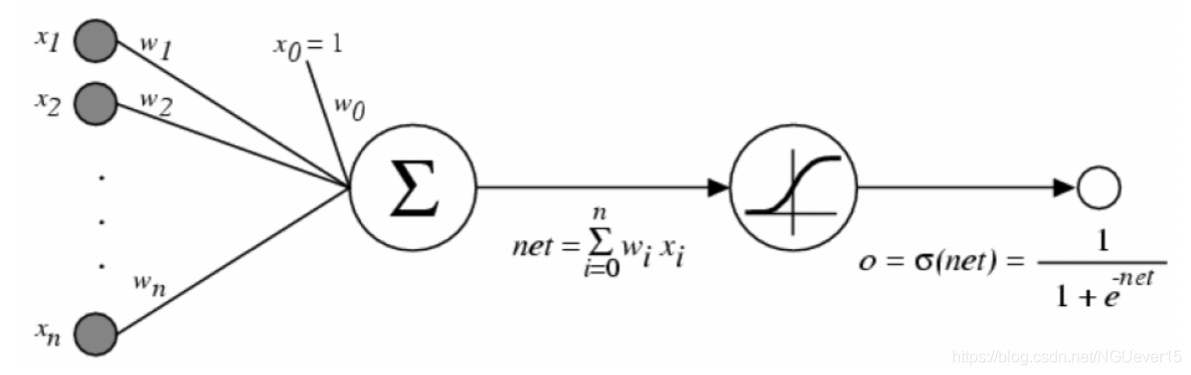 假设这是一个回归问题x->y,y=f(x)+ηy=f(x)+η, 则目标函数为
假设这是一个回归问题x->y,y=f(x)+ηy=f(x)+η, 则目标函数为 为了求出该函数的解,我们需要对其求导,具体的:
为了求出该函数的解,我们需要对其求导,具体的: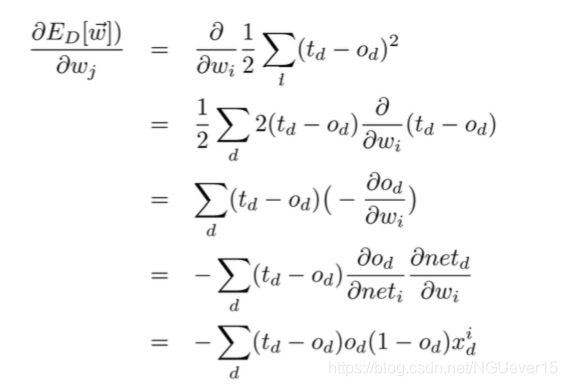 其中
其中
由此ww的更新公式为:
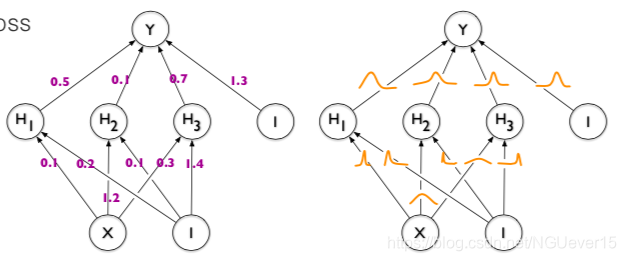
下面我们来说说神经网络模型: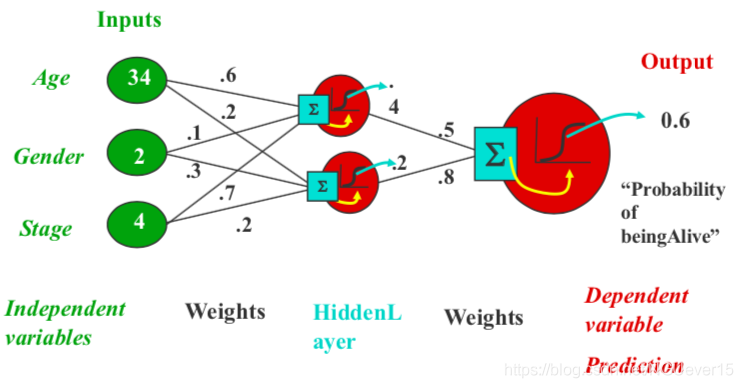 其中,隐藏单元没有目标。
其中,隐藏单元没有目标。
人工神经网络不过是可以由计算图表示的复杂功能组成。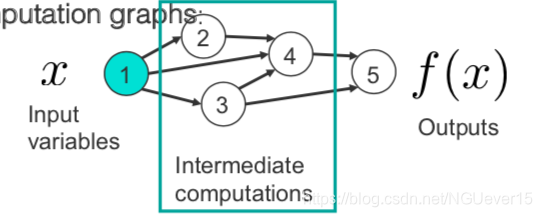 通过应用链式规则并使用反向累积,我们得到:
通过应用链式规则并使用反向累积,我们得到: 该算法通常称为反向传播。 如果某些功能是随机的怎么办?使用随机反向传播!现代软件包可以自动执行此操作(稍后再介绍)
该算法通常称为反向传播。 如果某些功能是随机的怎么办?使用随机反向传播!现代软件包可以自动执行此操作(稍后再介绍)
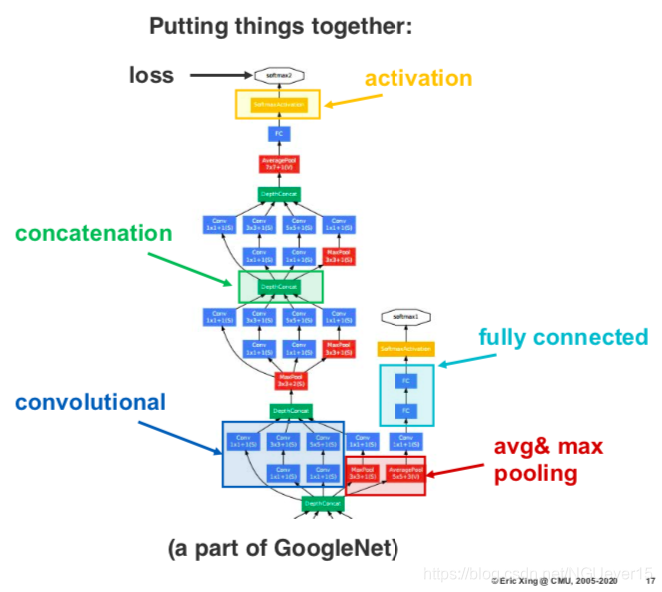
Modern building blocks: units, layers, activations functions, loss functions, etc.
常用激活函数:
- Linear and ReLU
- Sigmoid and tanh
- Etc.
网络层:
- Fully connected
- Convolutional & pooling
- Recurrent
- ResNets
- Etc. -
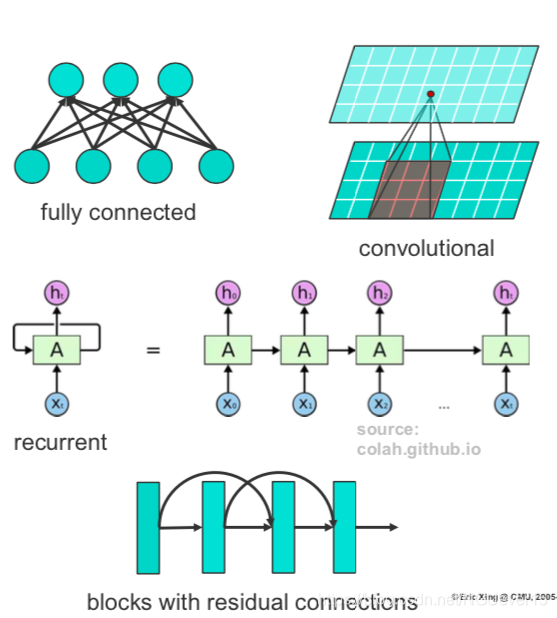
也就是说基本构成要素的可以任意组合,如果有多种损失功能的话,可以实现多目标预测和转移学习等。 只要有足够的数据,更深的架构就会不断改进。
Feature learning 成功学习中间表示[Lee et al ICML 2009,Lee et al NIPS 2009]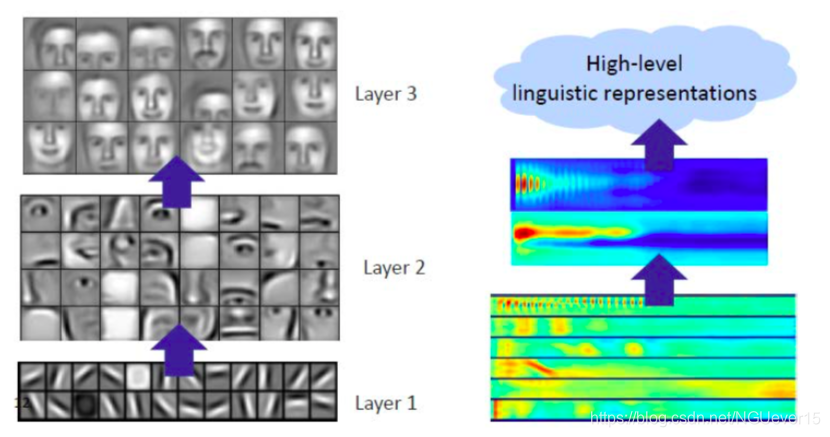 表示学习:网络学习越来越多的抽象数据表示形式,这些数据被“解开”,即可以进行线性分离。
表示学习:网络学习越来越多的抽象数据表示形式,这些数据被“解开”,即可以进行线性分离。
02 Similarities and differences between GMs and NNs
Graphical models vs. computational graphs
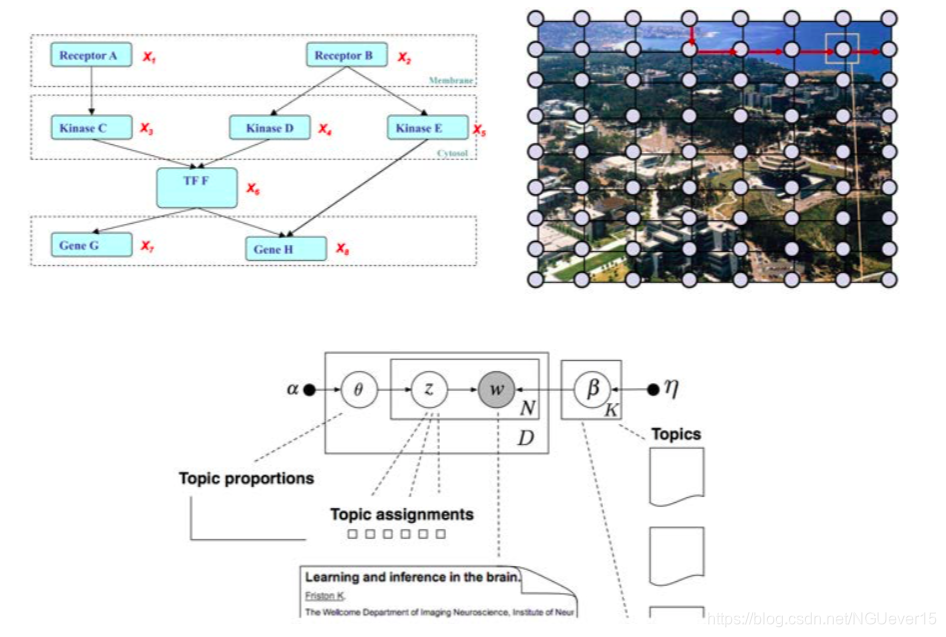
Graphical models:
- 用于以图形形式编码有意义的知识和相关的不确定性的表示形式
- 学习和推理基于经过充分研究(依赖于结构)的技术(例如EM,消息传递,VI,MCMC等)的丰富工具箱
- 图形代表模型
 Utility of the graph
Utility of the graph - 一种用于从局部结构综合全局损失函数的工具(潜在功能,特征功能等)
- 一种设计合理有效的推理算法的工具(总和,均值场等)
- 激发近似和惩罚的工具(结构化MF,树近似等)
- 用于监视理论和经验行为以及推理准确性的工具
Utility of the loss function
- 学习算法和模型质量的主要衡量指标
 Deep neural networks :
Deep neural networks :
- 学习有助于最终指标上的计算和性能的表示形式(中间表示形式不保证一定有意义)
- 学习主要基于梯度下降法(aka反向传播);推论通常是微不足道的,并通过“向前传递”完成
- 图形代表计算
Utility of the network
- 概念上综合复杂决策假设的工具(分阶段的投影和聚合)
- 用于组织计算操作的工具(潜在状态的分阶段更新)
- 用于设计加工步骤和计算模块的工具(逐层并行化)
- 在评估DL推理算法方面没有明显的用途
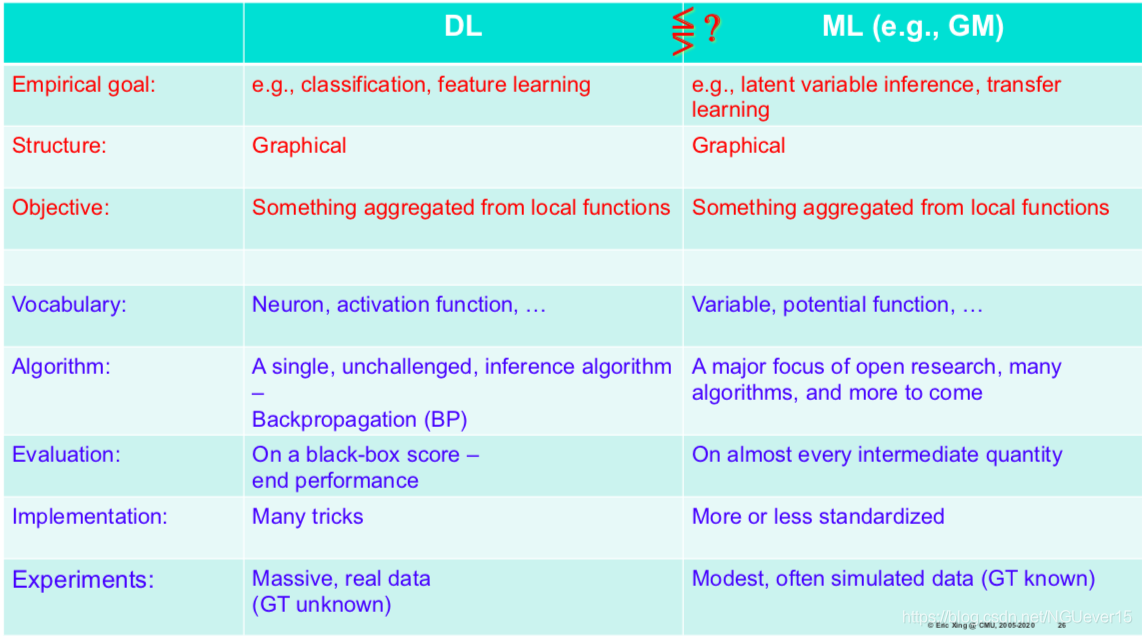
到目前为止,图形模型是概率分布的表示,而神经网络是函数近似器(无概率含义)。有些神经网络实际上是图形模型(即单位/神经元代表随机变量):
- 玻尔兹曼机器Boltzmann machines (Hinton&Sejnowsky,1983)
- 受限制的玻尔兹曼机器Restricted Boltzmann machines(Smolensky,1986)
- Sigmoid信念网络的学习和推理Learning and Inference in sigmoid belief networks(Neal,1992)
- 深度信念网络中的快速学习Fast learning in deep belief networks(Hinton,Osindero,Teh,2006年)
- 深度玻尔兹曼机器Deep Boltzmann machines(Salakhutdinov和Hinton,2009年)
接下来我们会逐一介绍他们。
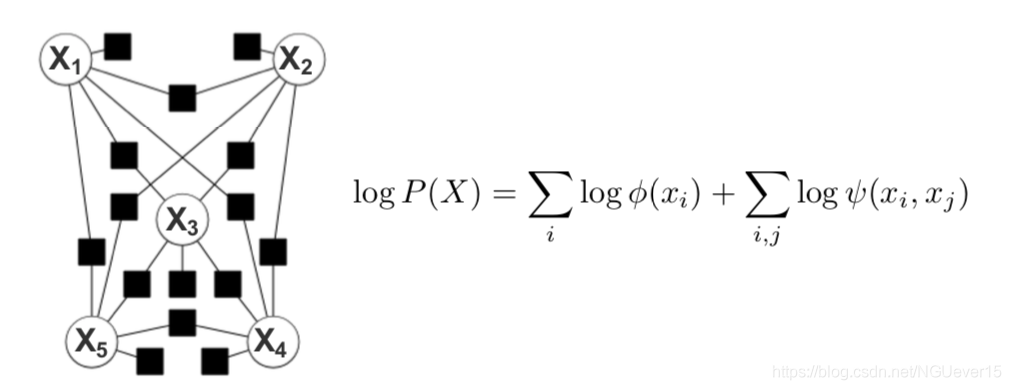
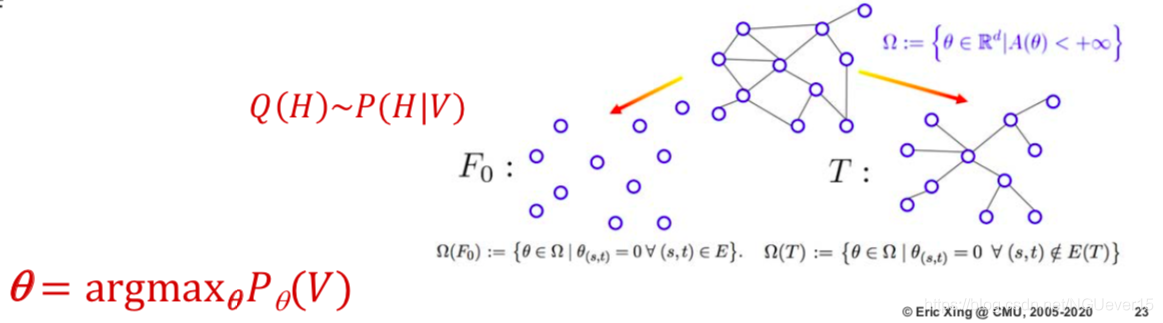
I: Restricted Boltzmann Machines 受限玻尔兹曼机器,缩写为RBM。 RBM是用二部图(bi-partite graph)表示的马尔可夫随机场,图的一层/部分中的所有节点都连接到另一层中的所有节点; 没有层间连接。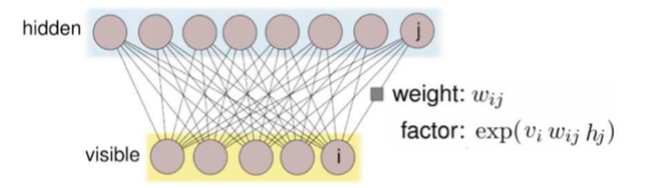 联合分布为:
联合分布为: 单个数据点的对数似然度(不可观察的边际被边缘化):
单个数据点的对数似然度(不可观察的边际被边缘化): 对数似然比的梯度 模型参数:
对数似然比的梯度 模型参数: 对数似然比的梯度 参数(替代形式):
对数似然比的梯度 参数(替代形式): 两种期望都可以通过抽样来近似, 从后部采样是准确的(RBM在给定的h上分解)。 通过MCMC从关节进行采样(例如,吉布斯采样)
两种期望都可以通过抽样来近似, 从后部采样是准确的(RBM在给定的h上分解)。 通过MCMC从关节进行采样(例如,吉布斯采样)
在神经网络文献中:
- 计算第一项称为钳位/唤醒/正相(网络是“清醒的”,因为它取决于可见变量)
- 计算第二项称为非固定/睡眠/自由/负相(该网络“处于睡眠状态”,因为它对关节的可见变量进行了采样;比喻,它梦见了可见的输入)
通过随机梯度下降(SGD)优化给定数据的模型对数似然来完成学习, 第二项(负相)的估计严重依赖于马尔可夫链的混合特性,这经常导致收敛缓慢并且需要额外的计算。
II: Sigmoid Belief Networks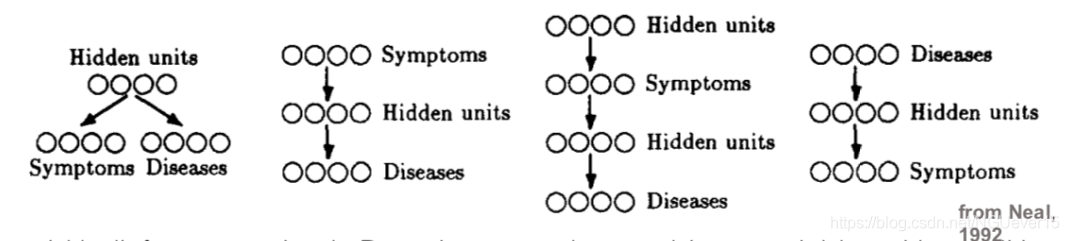 Sigimoid信念网是简单的贝叶斯网络,其二进制变量的条件概率由Sigmoid函数表示:
Sigimoid信念网是简单的贝叶斯网络,其二进制变量的条件概率由Sigmoid函数表示: 贝叶斯网络表现出一种称为“解释效应”的现象:如果A与C相关,则B与C相关的机会减少。 ⇒在给定C的情况下A和B相互关联。
贝叶斯网络表现出一种称为“解释效应”的现象:如果A与C相关,则B与C相关的机会减少。 ⇒在给定C的情况下A和B相互关联。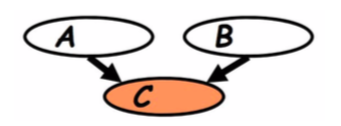 值得注意的是, 由于“解释效应”,当我们以信念网络中的可见层为条件时,所有隐藏变量都将成为因变量。
值得注意的是, 由于“解释效应”,当我们以信念网络中的可见层为条件时,所有隐藏变量都将成为因变量。
Sigmoid Belief Networks as graphical models
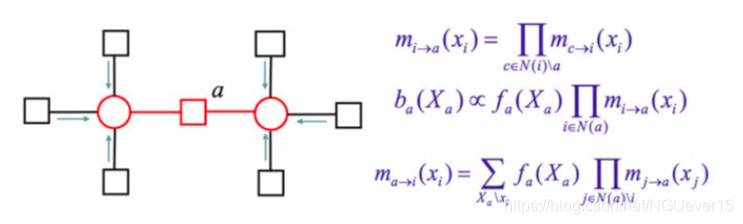
尼尔提出了用于学习和推理的蒙特卡洛方法(尼尔,1992年):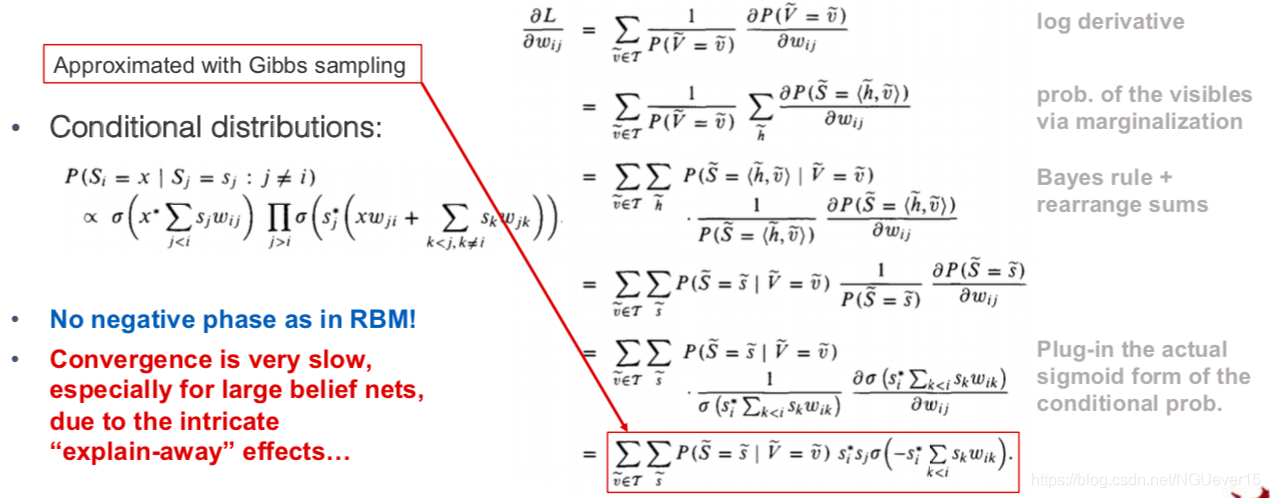 RBMs are infinite belief networks 要对模型参数进行梯度更新,我们需要通过采样计算期望值。
RBMs are infinite belief networks 要对模型参数进行梯度更新,我们需要通过采样计算期望值。
- 我们可以在第一阶段从后验中精确采样
- 我们运行吉布斯块抽样,以从联合分布中近似抽取样本
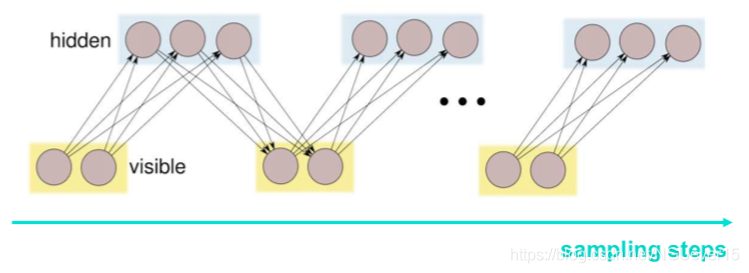
条件分布p(v|h)p(v|h)和p(h|v)p(h|v)用sigmoid表示, 因此,我们可以将以RBM表示的联合分布中的Gibbs采样视为无限深的Sigmoid信念网络中的自顶向下传播!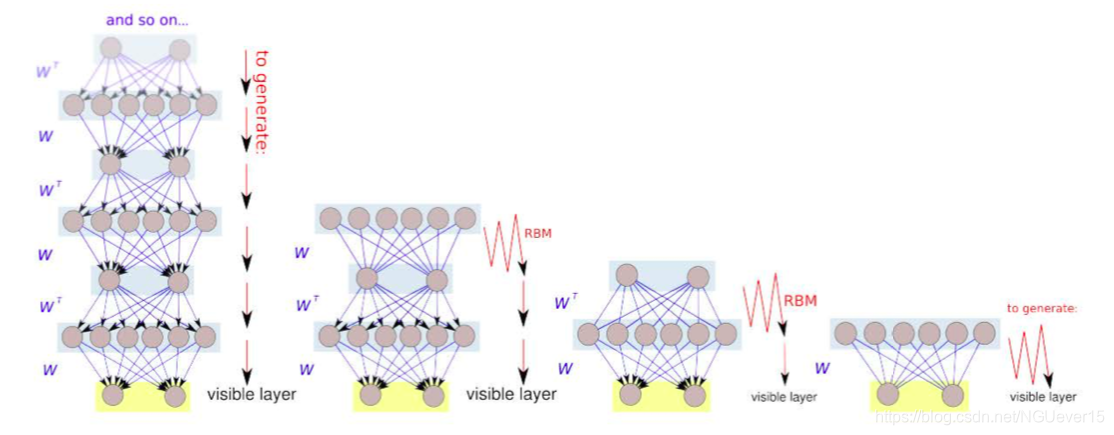 RBM等效于无限深的信念网络。当我们训练RBM时,实际上就是在训练一个无限深的简短网, 只是所有图层的权重都捆绑在一起。如果权重在某种程度上“统一”,我们将获得一个深度信仰网络。
RBM等效于无限深的信念网络。当我们训练RBM时,实际上就是在训练一个无限深的简短网, 只是所有图层的权重都捆绑在一起。如果权重在某种程度上“统一”,我们将获得一个深度信仰网络。
Deep Belief Networks and Boltzmann Machines
III: Deep Belief Nets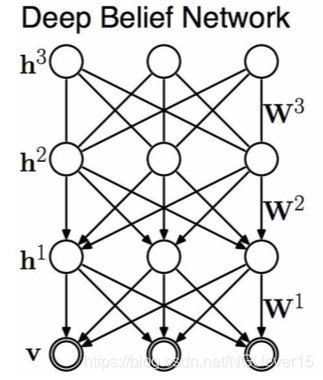 DBN是混合图形模型(链图)。其联合概率分布可表示为:
DBN是混合图形模型(链图)。其联合概率分布可表示为:
其中蕴含的挑战: 由于explaining away effect,因此在DBN中进行精确推断是有问题的 训练分两个阶段进行:
- 贪婪的预训练+临时微调; 没有适当的联合训练
- 近似推断为前馈(自下而上)
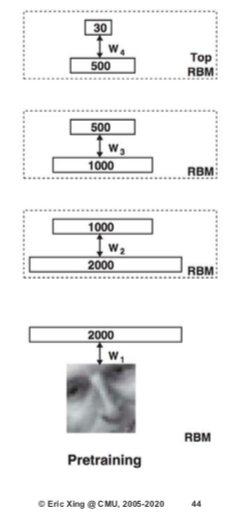
Layer-wise pre-training
- 预训练并冻结第一个RBM
- 在顶部堆叠另一个RBM并对其进行训练
- 重物2层以上的重物保持绑紧状态
- 我们重复此过程:预训练和解开
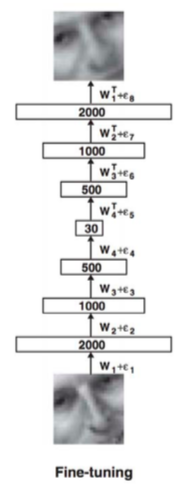
Fine-tuning
- Pre-training is quite ad-hoc(特别指定) and is unlikely to lead to a good probabilistic model per se
- However, the layers of representations could perhaps be useful for some other downstream tasks!
- We can further “fine-tune” a pre-trained DBN for some other task
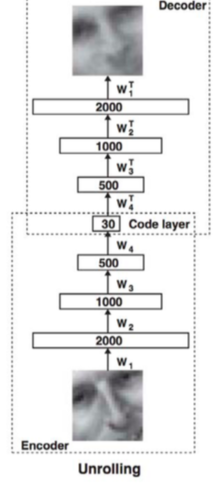
Setting A: Unsupervised learning (DBN → autoencoder)
- Pre-train a stack of RBMs in a greedy layer-wise fashion
- “Unroll” the RBMs to create an autoencoder
- Fine-tune the parameters by optimizing the reconstruction error(重构误差)
Setting B: Supervised learning (DBN → classifier)
- Pre-train a stack of RBMs in a greedy layer-wise fashion
- “Unroll” the RBMs to create a feedforward classifier
- Fine-tune the parameters by optimizing the reconstruction error
Deep Belief Nets and Boltzmann Machines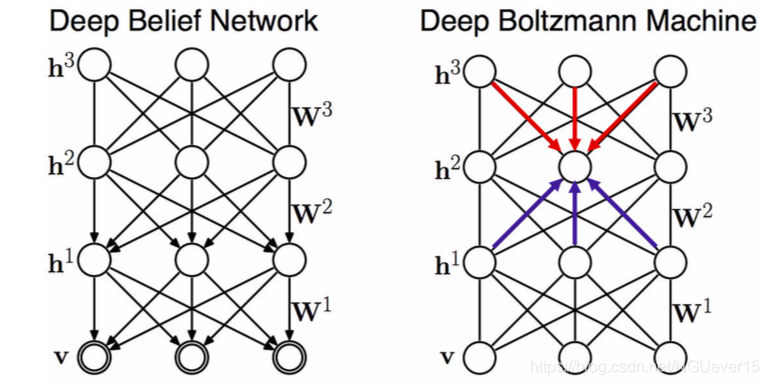 DBMs are fully un-directed models (Markov random fields). Can be trained similarly as RBMs via MCMC (Hinton & Sejnowski, 1983). Use a variational approximation(变分近似) of the data distribution for faster training (Salakhutdinov & Hinton, 2009). Similarly, can be used to initialize other networks for downstream tasks
DBMs are fully un-directed models (Markov random fields). Can be trained similarly as RBMs via MCMC (Hinton & Sejnowski, 1983). Use a variational approximation(变分近似) of the data distribution for faster training (Salakhutdinov & Hinton, 2009). Similarly, can be used to initialize other networks for downstream tasks
A few ==critical points== to note about all these models:
- The primary goal of deep generative models is to represent the distribution of the observable variables. Adding layers of hidden variables allows to represent increasingly more complex distributions.
- Hidden variables are secondary (auxiliary) elements used to facilitate learning of complex dependencies between the observables.
- Training of the model is ad-hoc, but what matters is the quality of learned hidden representations.
- Representations are judged by their usefulness on a downstream task (the probabilistic meaning of the model is often discarded at the end).
- In contrast, classical graphical models are often concerned with the correctness of learning and inference of all variables
Conclusion
- DL & GM: the fields are similar in the beginning (structure, energy, etc.), and then diverge to their own signature pipelines
- DL: most effort is directed to comparing different architectures and their components (models are driven by evaluating empirical performance on a downstream tasks)
- DL models are good at learning robust hierarchical representations from the data and suitable for simple reasoning (call it “low-level cognition”)
- GM: the effort is directed towards improving inference accuracy and convergence speed
- GMs are best for provably correct inference and suitable for high-level complex reasoning tasks (call it “high-level cognition”) 推理任务
- Convergence of both fields is very promising!
03 Combining DL methods and GMs
Using outputs of NNs as inputs to GMs
Combining sequential NNs and GMs HMM:隐马尔可夫
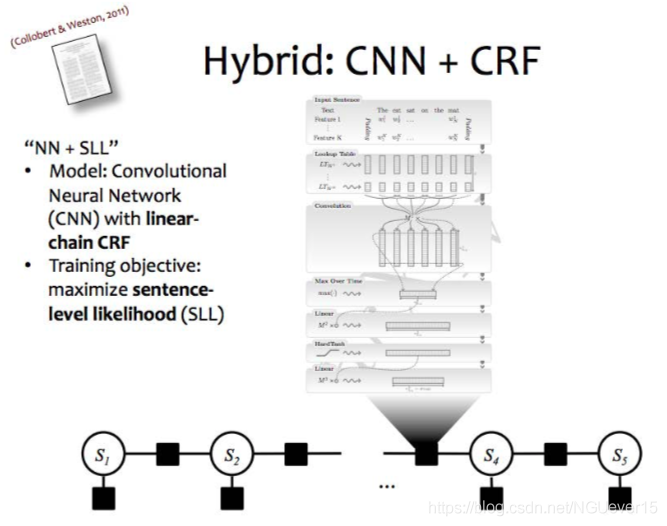
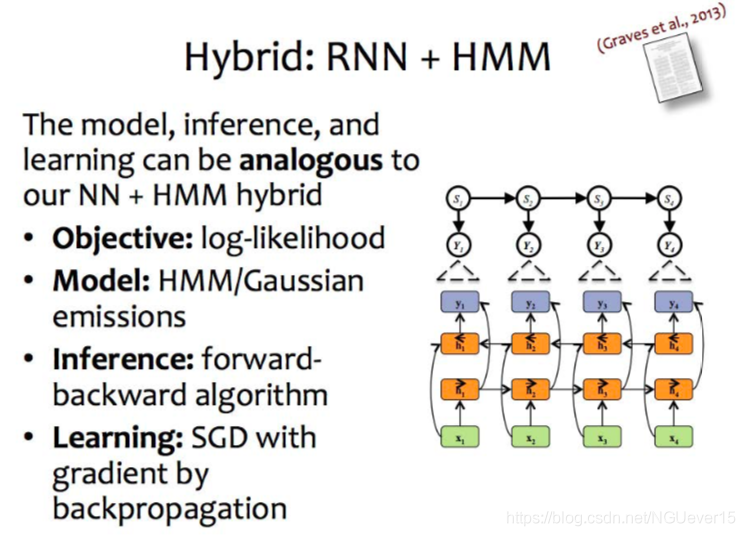 Hybrid NNs + conditional GMs
Hybrid NNs + conditional GMs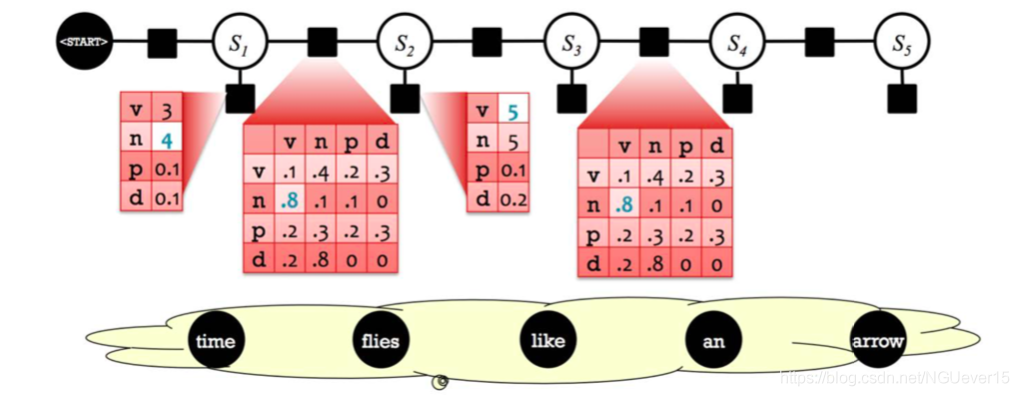 In a standard CRF条件随机场, each of the factor cells is a parameter. In a hybrid model, these values are computed by a neural network.
In a standard CRF条件随机场, each of the factor cells is a parameter. In a hybrid model, these values are computed by a neural network.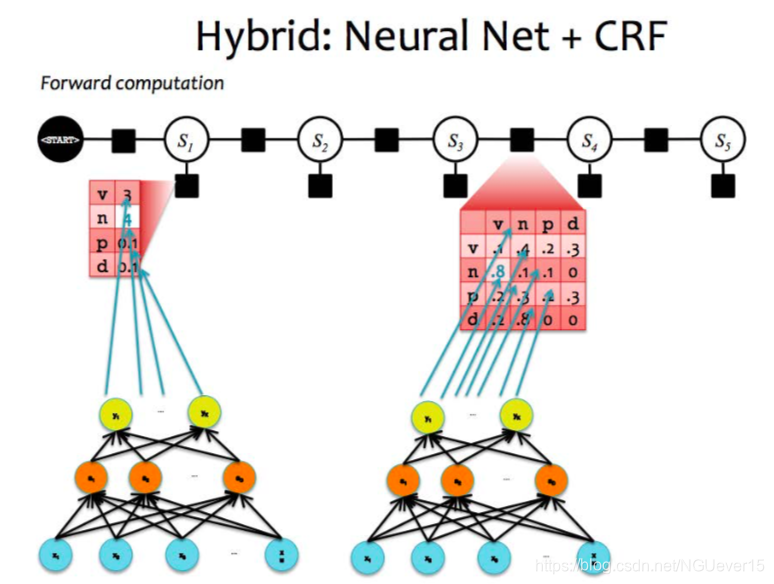
GMs with potential functions represented by NNs q NNs with structured outputs
Using GMs as Prediction Explanations
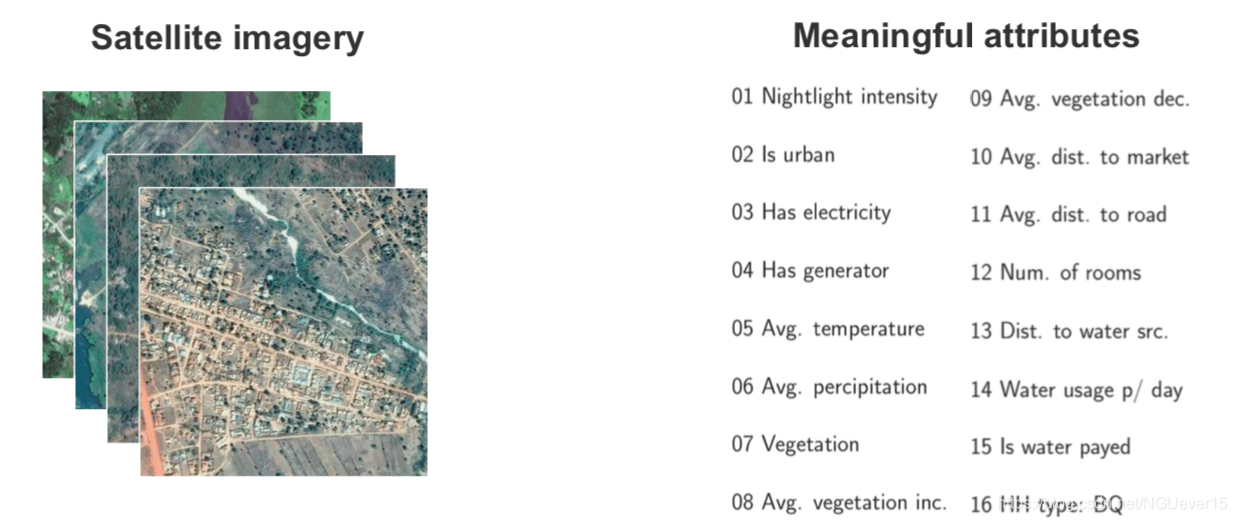 !!!! How do we build a powerful predictive model whose predictions we can interpret in terms of semantically meaningful features?
!!!! How do we build a powerful predictive model whose predictions we can interpret in terms of semantically meaningful features?
Contextual Explanation Networks (CENs)
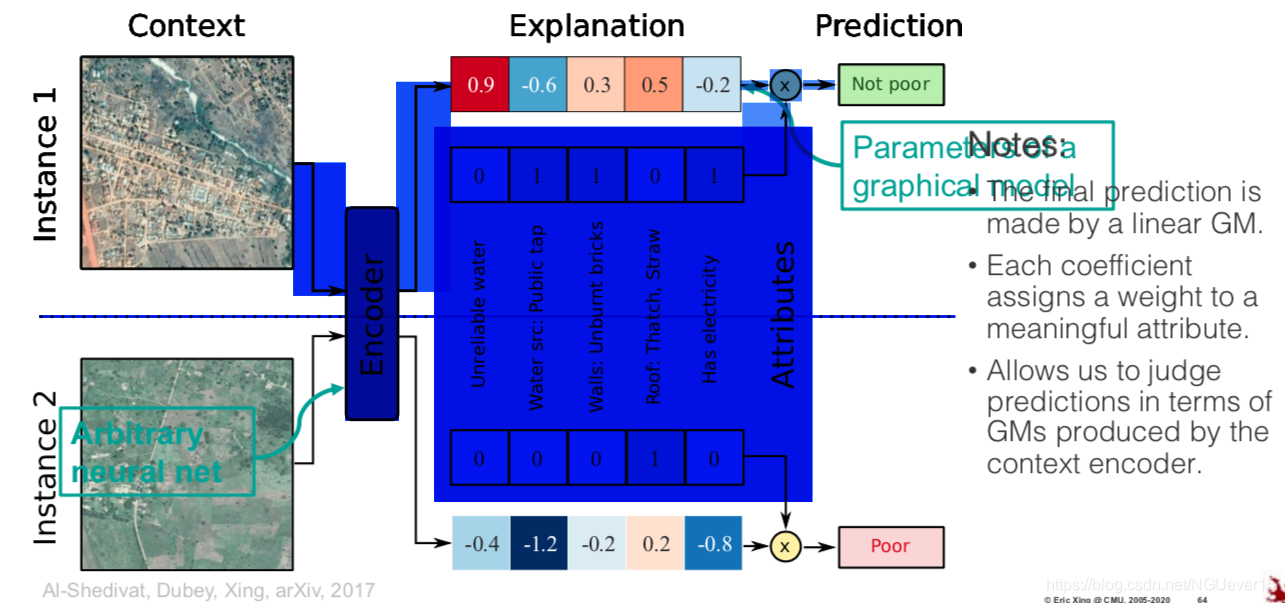
- The final prediction is made by a linear GM.
- Each coefficient assigns a weight to a meaningful attribute.
- Allows us to judge predictions in terms of GMs produced by the context encoder.
CEN: Implementation Details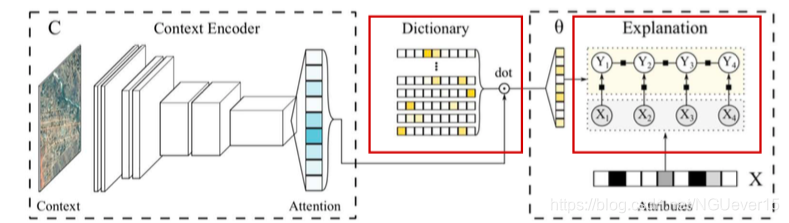 Workflow:
Workflow:
- Maintain a (sparse稀疏) dictionary of GM parameters.
- Process complex inputs (images, text, time series, etc.) using deep nets; use soft attention to either select or combine models from the dictionary. • Use constructed GMs (e.g., CRFs) to make predictions. • Inspect GM parameters to understand the reasoning behind predictions.
Results: imagery as context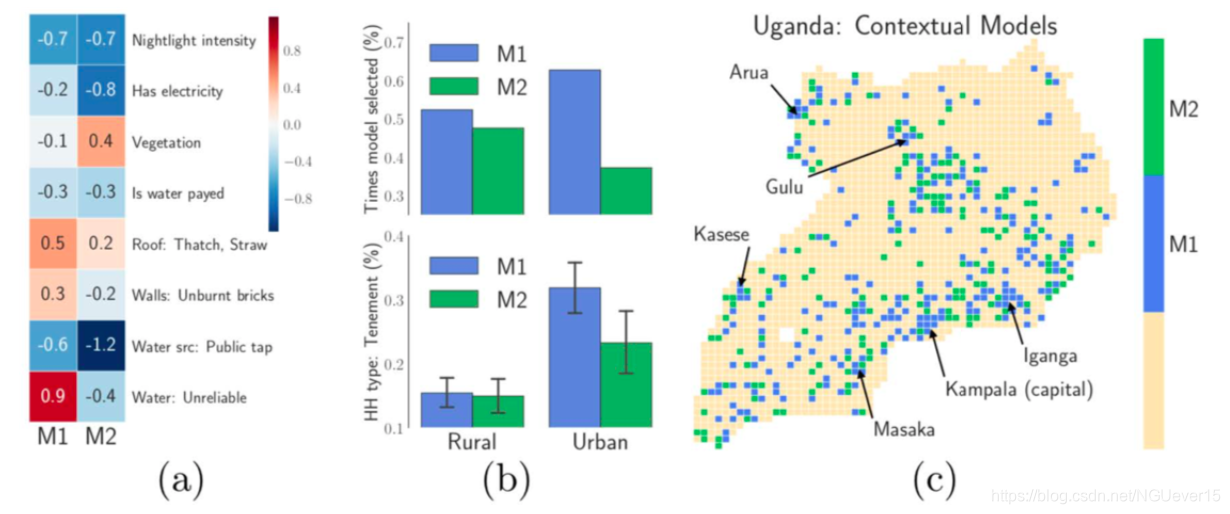 Based on the imagery, CEN learns to select different models for urban and rural
Based on the imagery, CEN learns to select different models for urban and rural
Results: classical image & text datasets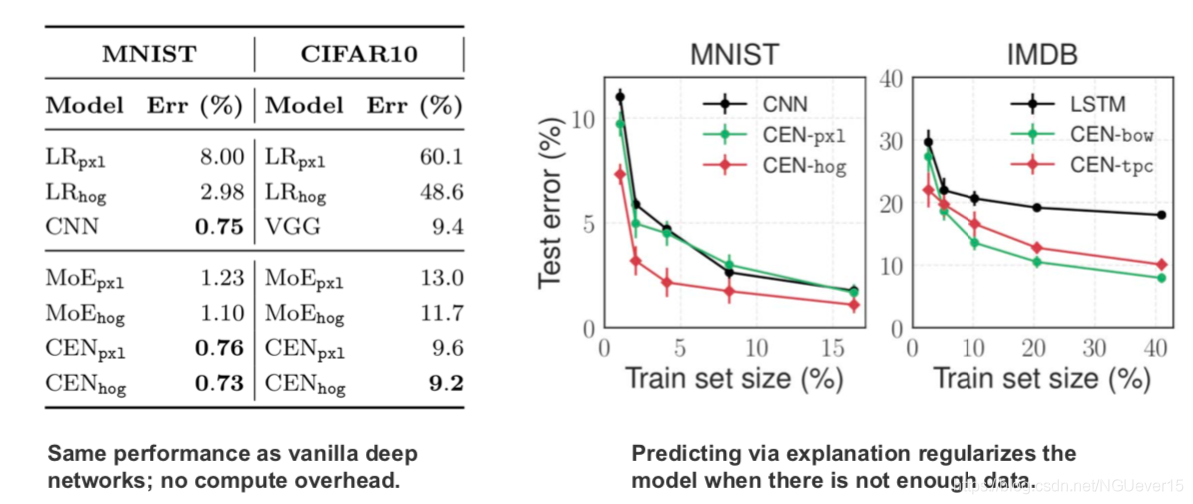 CEN architectures for survival analysis
CEN architectures for survival analysis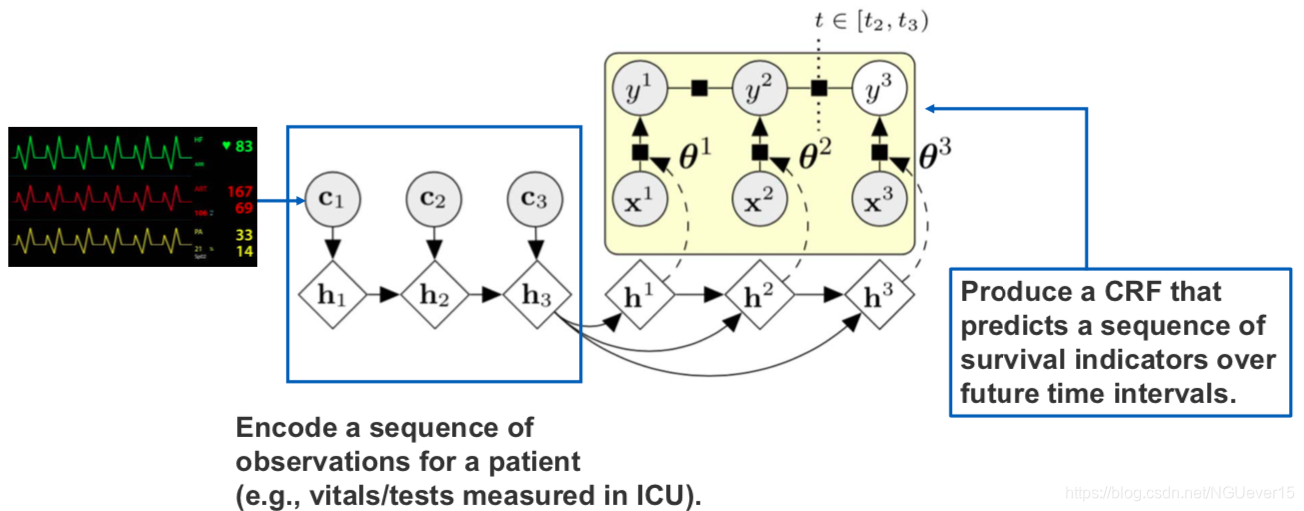
04 Bayesian Learning of NNs
Bayesian learning of NN parameters q Deep kernel learning
A neural network as a probabilistic model: Likelihood: p(y|x,θ)p(y|x,θ)
- Categorical distribution for classification ⇒ cross-entropy loss 交叉熵损失
- Gaussian distribution for regression ⇒ squared loss平方损失
- Gaussianprior⇒L2regularization
- Laplaceprior⇒L1regularization
Bayesian learning [MacKay 1992, Neal 1996, de Freitas 2003]